Partiendo de la premisa de realizar un monitoreo automático de calidad de agua, nace el interés de estudiar a las Redes de Sensores Inalámbricos (en inglés, Wireless Sensors Network, WSN) como una propuesta de solución. Chaamwe (2010) [1], menciona al monitoreo automático de la calidad de agua como un método de colocar sensores de calidad de agua en el cuerpo de agua, que se mide continuamente y cuya información obtenida se almacena en una memoria. Por lo tanto, es una herramienta eficaz para recolectar datos en una variedad de entornos incluyendo el monitoreo de la calidad de agua [1].
Este trabajo pretende dar una visión general de las Redes de Sensores Inalámbricos, las tecnologías usadas y los requisitos necesarios para poder realizar el monitoreo automático de calidad de agua subterránea. Primeramente se presenta una conceptualización, características y componentes de las WSN; en la tercera sección se presenta una recopilación de los antecedentes y trabajos relacionados sobre la utilización de WSN para el monitoreo del agua subterránea; en la cuarta sección se describen las soluciones comerciales y por último se plantean las conclusiones acerca de las secciones precedentes.
2. Redes de Sensores Inalámbricos (WSN)
Para hablar de las redes de sensores inalámbricos (en adelante WSN, Wireless Sensor Network) es necesario tener clara su conceptualización. Chaamwe (2010) [1], define las WSN como una red inalámbrica que consta de un gran número de pequeños sensores con transceptores de baja potencia para recolectar datos en una variedad de entornos.
Así mismo, Zennaro [2] define las WSN como una red de característica auto-configurable integrada por un pequeño número de nodos sensores también llamados “motes” distribuidos espacialmente y comunicados entre sí para lo que se usan señales de radio, con la finalidad de monitorear y entender el mundo físico.
Los datos recopilados por cada nodo sensor se comunican a través de la red a un único centro de procesamiento llamado sumidero o “sink”, que utiliza todos los datos reportados para determinar características del entorno o detectar un evento [1, 3, 4]. Otros autores [1, 5] llaman a al centro de procesamiento también como “estación base”.
Las características y limitaciones de las WSN, mencionadas por [5]:
- Son escalables, pudiendo llegar a tener una alta cantidad de nodos.
- Presentan independencia de fuentes externas de alimentación, casi siempre son alimentadas por medio de baterías.
- Altas limitaciones en cuanto a rango de comunicaciones, capacidades computacionales, de almacenamiento y energéticas de los nodos.
- Los nodos son propensos a fallas o daños físicos, por usarse generalmente en ambientes hostiles.
- Las redes WSN presentan cambios frecuentes en su topología, debido a daños o fallas en los nodos, desgaste energético o desvanecimiento del canal de comunicación.
- Cada nodo WSN es frágil en sí mismo, la fortaleza proviene de la cooperación de diversos nodos para cumplir una misión.
- En la mayoría de las aplicaciones de redes de sensores, la información obtenida por los sensores fluye desde muchos sensores hacia una sola estación base, por lo que se tiene un patrón de tráfico “muchos-a-uno”.
- Usualmente no es posible obtener un esquema de direccionamiento global en una red de sensores, debido al gran número de ellos que la conforman [6].
- La duración de los nodos puede ser de unos pocos días o meses, por lo tanto, los cambios de diseño eficaces deben ser considerados para prolongar su tiempo de vida a los años [7].
Las limitaciones observadas, específicamente sobre el monitoreo ambiental:
- El problema de cobertura, la atenuación de la señal, la configuración y las dificultades operativas, y la ausencia de un modelo de red para la captación en áreas con terrenos montañosos que afectan a los enlaces de radio [7].
- Se desarrollaron principalmente estándares WSN para el seguimiento de situaciones urbanas, como edificios e industrias. Sin embargo, son menos adecuados para aplicaciones remotas y de gran escala, como la agricultura [7].
- Los sensores instalados en agua necesitan limpieza y mantenimientos periódicos, para evitar contaminación biológica [8].
2.1. Componentes de las WSN
Los componentes básicos de una WSN que se destacan en la literatura son los nodos y estación base [1, 5, 9] y dependiendo del alcance se utiliza una pasarela o “Gateway” [10, 11].
En el trabajo realizado por [2], se indica que la estructura del nodo consta de:
- Un procesador que puede encontrarse en diferentes modos (dormido/ocioso).
- Fuente de alimentación (baterías o paneles solares), para el correcto funcionamiento de los diferentes componentes.
- Memoria para almacenamiento de datos y uso del programa.
- Radio utilizado para la comunicación.
- Sensores con la electrónica necesaria para poder realizar el acondicionamiento de la señal obtenida.
La forma y tamaño del nodo varía dependiendo de las necesidades de la aplicación, desde una caja de zapatos (por ejemplo, una estación meteorológica) hasta una partícula microscópicamente pequeña (por ejemplo, para aplicaciones militares donde los nodos deben ser casi invisibles); del mismo modo, el costo del nodo puede variar [12].
Dado que los nodos son dispositivos autónomos no conectados, su energía y otros recursos están limitados por el tamaño y costo. Por lo tanto, la energía y otros recursos disponibles en un nodo también pueden variar mucho de un sistema a otro. La energía puede almacenarse en baterías o mediante paneles solares [12].
Las estaciones base son uno o más componentes distinguidos de la WSN con mucho más recursos computacionales, de energía y de comunicación. Actúan como una pasarela entre los nodos y el usuario final, ya que suelen enviar los datos de la WSN a un servidor [9]. Muchas técnicas se utilizan para conectarse al mundo exterior, incluyendo redes de telefonía móvil, teléfonos satelitales, módems de radio, enlaces Wi-Fi de alta potencia y otros [9].
Los sensores pueden comunicarse directamente con la pasarela o “gateway”, pero esto será muy costoso para aquellos nodos sensores que no están cerca de la pasarela. Por lo tanto, la pasarela también es accesible a través de varias rutas, saltos múltiples sobre nodos de sensores en la red. La pasarela es responsable de la configuración de rutas para nodos de sensores y para el mantenimiento de la tabla de enrutamiento centralizada que indica el salto siguiente para cada nodo de sensor [11].
En la Fig. 1 se visualizan la utilización de nodos y estación base para realizar un monitoreo automático de la calidad de agua subterránea.
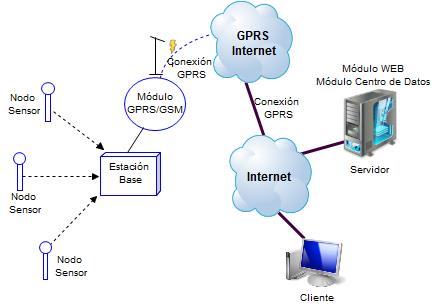
Fig. 1 Ejemplo de arquitectura del sistema para un monitoreo de calidad de agua subterránea
3. Usos de WSN para el Monitoreo del Agua Subterránea
Chaamwe (2010) [1], indicó que este método se aplica principalmente en las zonas mineras que son los principales contaminantes de las aguas subterráneas y también se aplica cerca de las fuentes de suministro de agua para determinar la calidad y las tendencias de los indicadores de calidad de agua.
Una búsqueda específica para conocer las implementaciones y experiencias de WSN para el monitoreo de la calidad de las aguas subterráneas, no arrojó resultados significantes y resultó difícil la identificación de dichos trabajos, con esto también coincide el trabajo realizado por [13], que menciona que las contribuciones en este campo carecen de un diseño del sistema integral y de una puesta en práctica, probablemente porque no existen normas para el desarrollo de estos sistemas y la tecnología todavía se basa en la evaluación experimental. Taffahi (2013) [13], destaca que sí se realizaron trabajos sobre un fondo diferente que no sea agua subterránea [13], [4].
Se identificaron los siguientes trabajos sobre WSN para el monitoreo de calidad de agua subterránea: [14], presenta una propuesta e implementación; [13, 15], son propuestas; [16 – 18], simulaciones; [1] es una revisión de las propiedades de WSN para proponer su uso en el monitoreo de aguas subterráneas.
Los principales sensores utilizados para monitorear los parámetros de calidad de agua subterránea en tiempo real fueron: sensor de pH [13], sensor de conductividad eléctrica [13], salinidad [14]. Los trabajos [13, 19], utilizaron soluciones comerciales y mencionaron que el costo varía entre USD 254 a 500 por nodo.
Las simulaciones realizadas en los trabajos [16 – 18] realizaron un seguimiento de la transferencia de datos en tiempo real, o analizaron los componentes por separados sin implementar el sistema.
En general, los trabajos identificados utilizaron la topología multi-hop en redes estrella o árbol. El área monitoreada fue pequeña, abarcando 1 km2 con 24 nodos [18] y 6 km2 con 8 nodos [14].
En la tabla 1 se mencionan las características que se creen son necesarias para poder implementar una WSN para el monitoreo de calidad de agua subterránea. Sin embargo, al realizar la revisión de los trabajos no se ha logrado completar la tabla con mucho éxito. Entre las características que nos interesaban identificar y no se mencionaron en los trabajos fueron: el tipo o característica del acuífero, la duración total del proyecto, periodo durante el cual se realizaron las mediciones, vida útil de sensores, duración de la batería y la seguridad física de los dispositivos.
La escases de trabajos sobre implementación de WSN para el monitoreo de la calidad de agua subterránea también podría deberse a las limitaciones identificadas por [7], donde menciona que las WSN se utilizan en pequeñas escalas, ausencia de sensores adecuados, sensores costosos por ejemplo para el monitoreo de nitrato, ausencia de sensores in situ económicos y fiables para todos los parámetros necesarios de calidad de agua, existe la necesidad de sensores con bajo consumo de energía. Pese a dichas limitaciones, [7] menciona que WSN sigue siendo muy eficaces debido a las evaluaciones fiables que se pueden realizar y la recolección de datos en tiempo real.
3.1 Tecnología Utilizada
En esta sección se tuvieron en cuenta las tecnologías de los trabajos [13-15]. La tecnología implentada en [14] para el monitoreo de calidad de agua subterránea fue la plataforma Fleck3 en los nodos, con una carcasa con techo. La serie Fleck de nodos se ha desarrollado en CSIRO ICT Center, Australia desde finales de 2003 [20].
Las características del Fleck3:
- Incorpora el microcontrolador Atmel Atmega128, con 4 Kbytes de memoria RAM y una CPU de 8 MHz, 1 Mb de memoria flash y un reloj.
- Incorpora un Transceptor NRF905 Nordic para la comunicación basada en paquetes.
- Posee un alcance de transmisión hasta 1.500 metros.
- Utiliza el sistema operativo TinyOS.
Los sensores implementados en [14] fueron:
- Toroidal Conductivity Sensor TCS1000 hecho por Sensorex.
- Sensor de presión PS100 hecho por Tyco.
En la propuesta hecha por [13] indicaron el uso de los componentes para el nodo:
Un microcontrolador ATMEGA32 con microprocesador, memoria, y funciones de E/S.
- Convertidor TLC0820AC (A/D).
- Transmisor de Radio Frecuencia (RF).
- Utilización de baterías recargables o energía solar.
Los sensores propuestos en [13] fueron:
- Sensor de presión MPXM2202.
- Sensor de pH LMC6081.
- Sensor de conductividad CS547A-L.
En la propuesta hecha por [15] indicaron el uso de los componentes para el nodo:
- Microchip’s PIC12F675 micro controller con convertidor A/D.
- Altera Nios FPGA development board.
- Dlink’s Ethernet-wireless bridge.
- Wireless base station.
El sensor propuesto en [15] fue:
4. Soluciones Comerciales
A continuación se presentan las soluciones comerciales de WSN para el monitoreo de la calidad de agua subterránea.
Solinst [21] posee «Solinst Sistema de Telemtry (STS)». STS permite la comunicación y control bidireccional entre una estación base y los nodos sensores ubicados en el nivel del agua subterránea. La comunicación celular utilizada son: GSM, CDMA, AMPS, línea de teléfono o radio. Es una solución costosa de implementar para un gran número de ubicaciones y es necesario utilizar el software proporcionado por la empresa para registrar los datos y los registradores de control [15]. Posee una aplicación de interfaz Leveloggers que utiliza la tecnología inalámbrica Bluetooth® para conectar sus Leveloggers a su dispositivo inteligente, equipado con el Levelogger Solinst App. La aplicación de interfaz Leveloggers simplemente se une al extremo superior de Lee directa por cable de su Levelogger. Con la aplicación del Levelogger Solinst, puede descargar los datos, ver los datos en tiempo real, datos de correo electrónico, y programar sus Leveloggers.
Solinst posee registradores automáticos como el sensor de presión para medir nivel del agua subterránea y temperatura, conductividad. Los parámetros medidos son: nivel del agua subterránea y temperatura, conductividad.
In-Situ lanzó el primer registrador de datos de la industria combinando robustez, facilidad de uso y alta precisión en pruebas de bombeo y monitoreo a largo plazo. In-Situ introdujo el primer registrador del mundo de datos de nivel del agua. Lanzó el primer sensor de temperatura, transductor y sensor de datos todo-en-uno de la compañía y se convirtió en el estándar de la industria para una solución para el monitoreo completo, autónomo y de largo plazo para aguas subterráneas. Además posee una linea de sensores llamado SmarTROLL handhelds, son los primeros sensores de monitoreo de calidad de agua de la industria con tecnología para utilizar con los dispositivos móviles, envía los datos inalámbricamente a un smartphone o tablet. Posee sondas duraderas que no requieren calibración, acondicionamiento o membranas.
In-Situ posee sensores multiparamétricos de hasta 14 parámetros de calidad de agua u otras con capacidades de medir 2 parámetros por sensor. Los parámetros medidos son: temperatura de aire y agua, conductividad, turbidez, oxígeno disuelto (Rugged Dissolved Oxygen, RDO), pH, potencial de reducción de oxidación (ORP), nivel del agua, salinidad, solidos disueltos totales, resistividad, densidad, presión barométrica.
OTT Hydromet posee sensores para aguas subterráneas, cuentan con una línea para el monitoreo del nivel del agua y otra para el monitoreo de la calidad de agua. Posee sensores multiparamétricos de 8, 6 y 14 parámetros para medir la calidad y nivel de agua: temperatura del agua, conductividad, profundidad, pH, oxígeno disuelto (Oxígeno Disuelto Luminiscente, LDO), turbidez, potencial de reducción de oxidación (ORP), clorofila a, algas azules-verdes, rodamina, amonio, nitrato, cloruro, concentración total de gases disueltos (TDG).
Entre las soluciones comerciales, se identificó una plataforma de monitoreo remoto basado en satélites, la Plataforma SatSCADA que incluye una gama de terminales SAT1xx basados en satélites que operan en la red de satélites Inmarsat y se conectan al servidor SatSCADA. El kit SAT100 está diseñado para el monitoreo remoto de agua subterránea y pozo, incluye un RTU del módem satelital SAT100, paneles solares, batería, carcasa resistente a la intemperie y soporte del pozo; puede conectarse a sensores de nivel de 4-20ma o sumergibles de otras compañías, basados en comunicación Modbus RS485. El SAT100 combina la operación de baja potencia con la comunicación satelital global para asegurar informes en tiempo real a intervalos programados. SCADALink SatSCADA Server proporciona acceso web y smartphone para ver los datos en tiempo real e incluso operar en los lugares más remotos.
5. Conclusión
El monitoreo de la calidad de agua está evolucionando con tecnologías emergentes como las WSN que están recibiendo mucha atención de los investigadores [1]. En este trabajo se examinó el estado del arte y las aplicaciones de WSN para el monitoreo de calidad de agua subterránea.
Las WSN son muy eficaces para realizar un monitoreo automático, debido a las evaluaciones fiables que se pueden realizar y la recolección de datos en tiempo real [7]. Los componentes básicos de una WSN que se destacan en la literatura son los nodos y estación base [1, 5, 9] y dependiendo del alcance se utiliza una pasarela o gateway [10, 11].
La idea de utilizar nodos de la forma más sencilla posible radica en que el número de estos inmersos en la red de sensores puede ser muy elevado, mucho mayor que la cantidad de sumideros y pasarelas a utilizar. Por tanto, se hace necesario intentar contener el precio y tamaño de los nodos lo más bajo posible.
En la literatura se presentan pequeñas áreas monitoreadas de 1 y 6 km2 con distancias entre los nodos de 120 metros [16] hasta 1.500 metros [14]. Los costos por nodos, encontrados en la literatura, varían entre USD 254 -500 [13], [19].
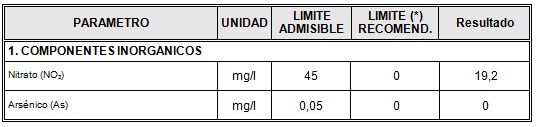
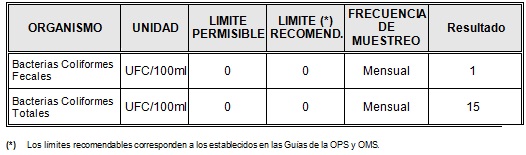
Los principales sensores utilizados para monitorear los parámetros de calidad de agua subterránea en tiempo real fueron: sensor de pH [13], sensor de conductividad eléctrica [13], salinidad [14]. Los parámetros de calidad de agua que permiten medir los sensores comerciales mencionados, solamente contemplan soluciones para medir algunos parámetros como: pH, conductividad, turbidez, nitrato. No contemplan soluciones para medir: hierro, cloro libre residual, coliformes totales, coliformes fecales y nitrógeno amoniacal.
Entre los trabajos revisados, se han encontrado la utilización de sensores inalámbricos para monitorear automáticamente otras características del agua subterránea como: la profundidad del agua [14, 16 – 21], el subsuelo y la cantidad de agua subterránea que se bombea hacia fuera [16], humedad del suelo [21], temperatura [21].
7. Referencias
[1] N. Chaamwe, «Wireless Sensor Networks for Water Quality Monitoring: A Case of Zambia,» presented at the Bioinformatics and Biomedical Engineering (iCBBE), 2010 4th International Conference, 2010.
[2] M. Zennaro. (2012, 02-02-2017). Introduction to Wireless Sensor Networks Available: http://wireless.ictp.it/wp-content/uploads/2012/02/Zennaro.pdf
[3] M. Grossglauser and D. N. C. Tse, «Mobility increases the capacity of ad hoc wireless networks,» IEEE Transactions on Networking, vol. 10 no. 4, 2002.
[4] A. Cama-Pinto, F. Gil-Montoya, J. Gómez-López, A. García-Cruz, and F. Manzano-Agugliaro, «Wireless surveillance sytem for greenhouse crops,» Dyna, vol. 81(184), pp. 164-170, 2013.
[5] C. S. Regoli A., «Diseño de un Método de Enrutamiento Activo para Redes Inalámbricas de Sensores (WSN),» Master en Automática, Robótica y Telemática, Departamento de Ingeniería de Sistemas y Automática, Universidad de Sevilla, 2013.
[6] A. I. Sankarasubramaniam, S. W., and C. E., «Wireless sensor networks. a survey,» Computer Networks, 2002.
[7] H. Zia, N. R. Harris, G. V. Merrett, M. Rivers, and N. Coles, «The impact of agricultural activities on water quality: A case for collaborative catchment-scale management using integrated wireless sensor networks,» Computers and Electronics in Agriculture, vol. 96, pp. 126–138, 2013.
[8] F. Regan, A. Lawlor, B. O. Flynn, J. Torres, R. Martinez-Catala, C. O’Mathuna, et al., «A demonstration of wireless sensing for long term monitoring of water quality,» IEEE, vol. 96, pp. 819–825, 2009.
[9] V. Kumar, Jain, A. and P. N. Barwal, «Wireless sensor networks: security issues, challenges and solutions,» International Journal of Information and Computation Technology (IJICT), vol. 4(8), pp. 859-868, 2014.
[10] D. Christin, A. Reinhardt, P. S. Mogre, and R. Steinmetz, «Wireless sensor networks and the internet of things: selected challenges. ,» 2009.
[11] T. Haider and M. Yusuf, «A fuzzy approach to energy optimized routing for wireless sensor networks,» Int. Arab J. Inf. Technol., vol. 6(2), pp. 179-185, 2009.
[12] K. Romer and F. Mattern, «The design space of wireless sensor networks,» IEEE wireless communications, vol. 11(6), pp. 54-61, 2004.
[13] H. Taffahi, N. Bensouda, and Y. S. Alj, «Automated Groundwater Monitoring Using Telemetry,» presented at the 2013 4th International Conference on Intelligent Systems, Modelling and Simulation, 2013.
[14] T. Le Dinh, W. Hu, P. Sikka, P. Corke, L. Overs, and S. Brosnan, «Design and deployment of a remote robust sensor network: Experiences from an outdoor water quality monitoring network,» presented at the 32nd IEEE Conference on Local Computer Networks (LCN 2007), 2007.
[15] S. Anumalla, B. Ramamurthy, D. C. Gosselin, and M. Burbach, «Ground water monitoring using smart sensors,» presented at the 2005 IEEE International Conference on Electro Information Technology, 2005.
[16] P. Loden, Q. Han, L. Porta, T. Illangasekare, and A. P. Jayasumana, «A wireless sensor system for validation of real-time automatic calibration of groundwater transport models,» Journal of Systems and Software, vol. 82(11), pp. 1859-1868, 2009.
[17] R. P. Barnwal, S. Bharti, S. Misra, and M. S. Obaidat, «UCGNet: wireless sensor network‐based active aquifer contamination monitoring and control system for underground coal gasification,» International Journal of Communication Systems, 2014.
[18] H. A. Tarish, M. S. Mahdi, and M. S. Croock, «Wireless Sensor Network structure for Ground water Well’s Field in Karbala City,» International Journal of Computer Applications, vol. 159(9), 2017.
[19] X. Li, X. Cheng, P. Gong, and K. Yan, «Design and implementation of a wireless sensor network-based remote water-level monitoring system,» Sensors, vol. 11(2), pp. 1706-1720, 2011.
[20] R. R. Selmic, V. V. Phoha, and A. Serwadda, Wireless Sensor Networks: Security, Coverage, and Localization vol. 69, 2016.
[21] (20-01-2017). Solinst.com. Available: http://www.solinst.com